استپ درایو HQM
Showing all 8 results

درایور موتور مغزِ کنترلی حلقه حرکت است؛ قطعهای که فرمانهای کنترلر را به جریانهای دقیق و الگوریتمی تبدیل میکند تا استپر موتور یا سرووموتور با دقت، گشتاور و سرعت مطلوب حرکت کند. انتخاب درست درایور، مستقیماً روی کیفیت سطح، تکرارپذیری، نویز، گرمایش و طول عمر مکانیزم اثر میگذارد. در این دسته میتوانید انواع درایور استپ موتور دو فاز و سه فاز، درایور کلوزلوپ (Closed-Loop) و سروو درایو AC را بر اساس ولتاژ، جریان، تعداد فاز، رابطهای کنترلی و امکانات حفاظتی مقایسه و انتخاب کنید.
چرا انتخاب درایور مناسب حیاتی است؟
-
گشتاور پایدار در سرعت: درایور درست با ولتاژ و تنظیمات مناسب، افت گشتاور را در rpmهای بالا بهطور محسوسی کاهش میدهد.
-
حرکت نرم و بیرزونانس: میکرواستپ دقیق، فیلترهای دیجیتال و کنترل جریان پیشرفته، لرزش و خطوط دندانهدار را کم میکند.
-
حفاظت از موتور و سیستم: حفاظتهای Overcurrent/Overvoltage/Overheat و شناسایی خطاها از آسیبهای پرهزینه جلوگیری میکند.
-
سازگاری با کنترلرهای رایج: پشتیبانی از Pulse/Dir، CW/CCW، ±۱۰V، PWM یا شبکههای Modbus/CANopen/EtherCAT ادغام در خطوط صنعتی را ساده میکند.
انواع درایور در این دسته
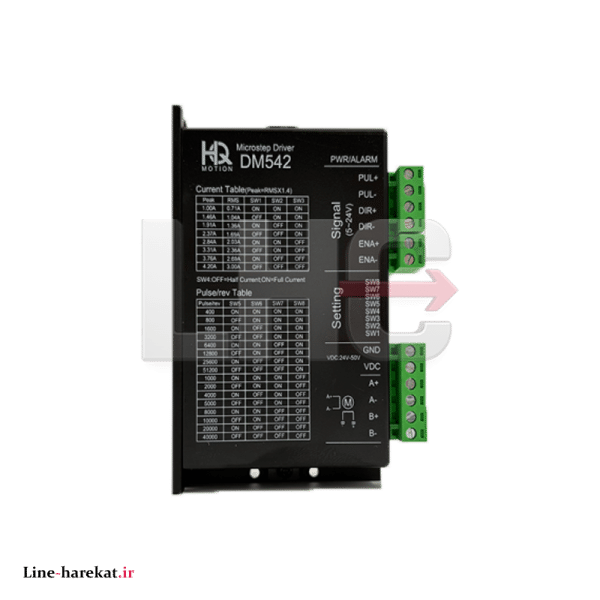
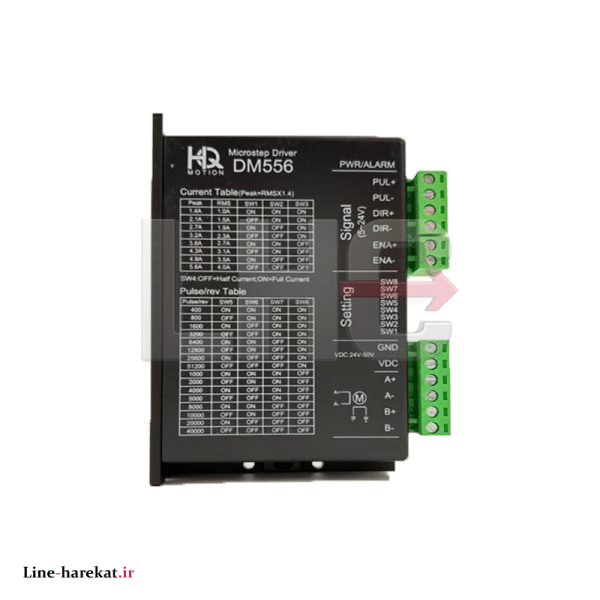
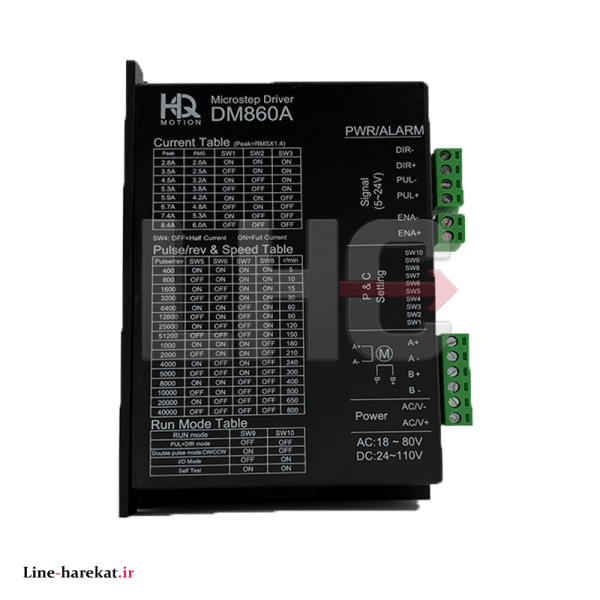
1) درایور استپر دو فاز (Hybrid Stepper)
پرکاربردترین گزینه برای CNC سبک تا نیمهصنعتی، پرینتر سهبعدی، پلاتر و دستگاههای بستهبندی.
-
میکرواستپ: از ۱/۲ تا ۱/۲۵۶ (بسته به مدل)، برای حرکت نرمتر.
-
جریان خروجی: معمولاً ۲ تا ۸ آمپر؛ مناسب NEMA17/23/24/34.
-
ولتاژ تغذیه: ۲۴، ۳۶ یا ۴۸ ولت DC (هرچه بالاتر، بهتر برای سرعتهای زیاد—در محدوده مجاز درایور).
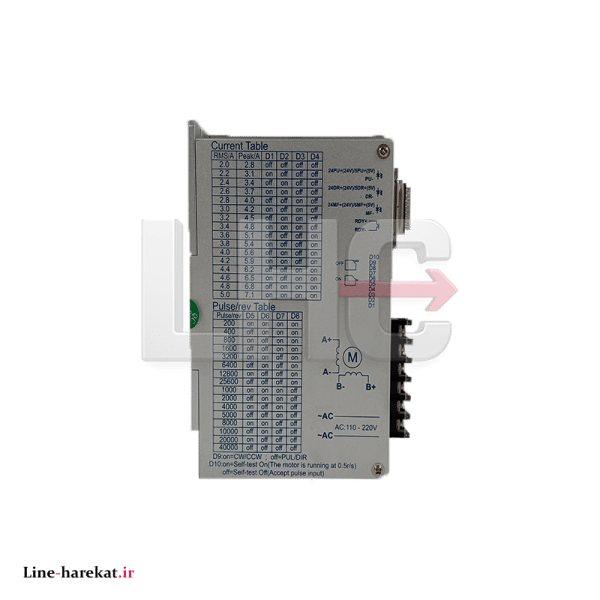
2) درایور استپر سه فاز
برای حرکت نرمتر، گشتاور بهتر در سرعتهای بالا و کاهش رزونانس نسبت به دو فاز. مناسب میزهای بزرگتر، راکپینیون، یا مسیرهای طولانی و سریع.
3) درایور کلوزلوپ (استپر با انکودر)
ترکیب سادگی استپر و اطمینان حلقهبسته؛ با فیدبک انکودر، خطای دنبالسازی اصلاح میشود و Lost Step عملاً از بین میرود. گشتاور دینامیکی بهتر، توقف و استارتهای دقیقتر.
4) سروو درایو AC
برای کاربردهای صنعتی دقیق و پرسرعت؛ مناسب موتورهای ۴۰۰ وات تا چند کیلووات با انکودر اینکرمنتال/ابسولوت.
-
مودهای کنترلی: موقعیت (Pulse/Dir/EtherCAT)، سرعت (±۱۰V)، گشتاور.
-
ویژگیهای پیشرفته: Auto-Tuning، Notch Filter، Feed Forward، STO (Safe Torque Off)، مقاومت ترمز (Regen).
راهنمای انتخاب سریع
-
نوع مکانیزم حرکت:
-
بالاسکرو گام ۵–۱۰ و میز متوسط → استپر دو فاز یا کلوزلوپ NEMA23/34.
-
راکوپینیون سرعتبالا یا میز بلند → استپر سه فاز یا کلوزلوپ توانمند.
-
CNC صنعتی، سرعت و دقت بالا، محورهای سنگین → سروو درایو AC.
-
-
گشتاور/جریان موردنیاز:
-
برای استپر: گشتاور نامی موتور را با جریان درایور مچ کنید؛ درایور را کمی بالاتر از جریان نامی موتور انتخاب کنید تا حاشیه داشته باشید.
-
برای سروو: به جریان نامی/پیک درایو و قدرت موتور توجه کنید؛ محور Z معمولاً به ترمز موتور و پیک بالاتر نیاز دارد.
-
-
ولتاژ تغذیه:
-
استپر: ۳۶ یا ۴۸ ولت DC برای حفظ گشتاور در سرعتهای بالا عالی است.
-
سروو: ۲۲۰ یا ۳۸۰ VAC بسته به سری موتور/درایو؛ به ظرفیت خط و فیوزینگ توجه کنید.
-
-
رابط کنترلی:
-
CNC مبتنی بر Mach/USB/Ethernet → خروجی Pulse/Dir.
-
PLC محور با حلقه سرعت/گشتاور → ±۱۰V یا Fieldbus.
-
خطوط هوشمند و همزمانی چندمحوره → CANopen/EtherCAT.
-
-
امکانات حفاظتی و صنعتی:
-
ایزولاسیون اپتو برای ورودیها، محافظت حرارتی، Alarm Relay، EMI Filter، STO در سرووها.
-
نکات نصب و سیمبندی حرفهای
-
تفکیک قدرت از فرمان: کابل موتور/VFD/پمپ را از کابلهای پالس و انکودر جدا عبور دهید؛ تقاطعها را عمود نگه دارید.
-
کابل شیلددار و زمینکردن صحیح: شیلد سیگنالها را معمولاً از یک سمت زمین کنید تا حلقه ارت تشکیل نشود.
-
منبع تغذیه توانمند: برای درایورهای DC، توان منبع را با تعداد محورها و ضریب همزمانی محاسبه کنید؛ رپل و افت ولتاژ را پایین نگه دارید.
-
خنککاری درایور: نصب روی ریل و هیتسینک/فن الزامی است؛ درایورها به گرما حساساند.
-
تنظیمات جریان و میکرواستپ: جریان درایور را نزدیک جریان نامی موتور بگذارید (برای کاهش گرما، حداکثر ۱۰–۱۵٪ کمتر). میکرواستپ ۱/۸ تا ۱/۱۶ معمولاً تعادل خوبی بین نرمی و سقف سرعت ایجاد میکند.
-
در سروو: پارامترهای اتوتیون را با بار واقعی انجام دهید؛ Notch Filter را برای حذف رزونانس مکانیکی فعال کنید. Regen Resistor را برای توقفهای تند فراموش نکنید.
سناریوهای رایج انتخاب
-
CNC چوب/MDF: استپر دو فاز NEMA23 با درایور دیجیتال ۴–۶A و تغذیه ۳۶/۴۸V؛ برای میزهای بزرگ، سه فاز یا کلوزلوپ.
-
آلومینیوم سبک/تابلوسازی: کلوزلوپ NEMA23/34 برای جلوگیری از افت گام و بهبود کیفیت لبه.
-
محور Z: درایور/سروویی را انتخاب کنید که ترمز موتور و پیک گشتاور مناسب دارد.
-
خطوط دقیق و سریع: سروو درایو AC با EtherCAT/CANopen برای همزمانی عالی و فیدبک رزولوشن بالا.
اشتباهات رایج که باید از آنها دوری کنید
-
انتخاب فقط بر اساس وات: معیار اصلی در استپر، جریان و گشتاور موتور است؛ در سروو، جریان نامی/پیک و منحنی سرعت-گشتاور.
-
ولتاژ پایین تغذیه استپر: باعث ریزش گشتاور در سرعتهای بالاتر میشود.
-
میکرواستپ خیلی بالا با کنترلر کند: اگر نرخ پالس کنترلر کافی نباشد، سقف سرعت خطی کاهش مییابد.
-
کابلکشی غیرایزوله و بدون شیلد: نویز و EMI منجر به خطاهای تصادفی و سطح برش دندانهدار میشود.
-
عدم استفاده از Regen در سروو: توقفهای سریع بدون مقاومت ترمز، خطای Overvoltage و آسیب احتمالی میآورد.
-
تنظیم جریان بیشازحد: گرمایش موتور/درایور و کاهش عمر. جریان را علمی و با تست دمایی تنظیم کنید.
پرسشهای متداول (FAQ)
۱) درایور دیجیتال چه برتری نسبت به آنالوگ دارد؟
پروفایل جریان دقیقتر، میکرواستپهای ریزتر، فیلترهای ضد رزنانس و معمولاً صدای کمتر و کیفیت سطح بهتر.
۲) کلوزلوپ واقعاً لازم است؟
برای مسیرهای طولانی، سرعت بالا، بار متغیر یا حساسیت به کیفیت سطح، کلوزلوپ خیالتان را از افت گام راحت میکند و گشتاور دینامیکی را افزایش میدهد.
۳) برای استپر دو فاز، ۲۴، ۳۶ یا ۴۸ ولت؟
اگر درایور اجازه دهد، ۳۶/۴۸ ولت بهوضوح نگهداشت گشتاور را در سرعتهای بالا بهتر میکند.
۴) درایور سروو را چطور با کنترلر مچ کنم؟
اگر کنترلر شما پالس میدهد، درایور باید Pulse/Dir را بپذیرد؛ برای PLC محور از ±۱۰V یا فیلدباس استفاده کنید. به ایزولاسیون و سطوح ولتاژ ورودی دقت کنید.
۵) در محور Z چه نکاتی مهم است؟
ترمز موتور، گشتاور پیک کافی، جبران گرانش در کنترلر/درایو و مقاومت ترمز برای توقفهای اضطراری.
۶) چطور رزونانس سرعت پایین را کم کنم؟
میکرواستپ را تغییر دهید، ولتاژ تغذیه را بالا ببرید (در محدوده مجاز)، درایور سه فاز/کلوزلوپ یا دمپر مکانیکی استفاده کنید.
۷) آیا همه درایورها با NEMA23/34 سازگارند؟
استاندارد NEMA به ابعاد فلنج اشاره دارد؛ جریان/ولتاژ/اندوکتانس موتور را با مشخصات درایور تطبیق دهید.
۸) دمای بالای درایور طبیعی است؟
گرمایش تا حدی طبیعی است، اما با هیتسینک/فن و تهویه مناسب، دما باید در محدوده ایمن بماند؛ در غیر این صورت تنظیم جریان و محیط نصب را بازنگری کنید.